欢迎来到工程机械品牌网!


基于雷达探测的挖掘机用哨兵系统
发布时间:2020-10-20 15:18
来源: 《建设机械技术与管理》杂志
陈维雄 王宾 常云飞
(雷沃工程机械集团有限公司,山东青岛 266000)
摘要:工程机械挖掘机工作环境恶劣且不易进行监控,同时机器或者机器上关键零部件的安全无法得到保障,经常发生被人调换或者盗取现象。就此本文针对挖掘机的防盗监控系统与方法进行了研究,提出了一种挖掘机用哨兵系统。该系统使用雷达作为可疑物体的探测手段,采用高精度摄像头作为传输载体,由此构成车身周围的探测网,首先详细论述了哨兵系统的基本功能及组成原理;其次,通过Simulink平台搭建控制策略模型,实现哨兵系统实时传输探测信息的功能,验证了系统监测车身探测网的可行性,为工程机械防盗提出了一种独立、高效的新方法。
关键词:挖掘机;探测网;防盗;Simulink
中图分类号: TU621 文献标识码:A
0 引言
随着全球工业的发展,工程机械行业在工业发展中发挥着至关重要的作用[1][2]。挖掘机的工作环境是在野外或者矿山,通常结束工作后都是停放在工作现场以便于第二天继续进行工作。一般工作现场是无人看管的,机器或者机器上关键零部件的安全无法得到保障。现实中经常发现机器上的零部件被人调换或者盗取的现象。
目前行业内还没有出现比较好的方案来解决这个问题[3]。有一些工地会安装影像监控装置来监控现场安全,但是以上方案还存在以下问题:
(1)工地是否安装监控设备,工程机械的车主不能掌控,而且一些野外环境不易安装监控设备;
(2)监控范围会有一定的盲区,无法做到全方位的监控;
(3)一般是事后才能查看监控,无法实时获得监控图像信息,在处理突发事件时,存在滞后性。
为了克服上述现有技术的不足,本文提供了一种工程机械防盗系统及其工作方法,能够在事件发生时,及时通知车主并起到预警的功能。
1 哨兵系统方案及组成原理
哨兵系统由可疑物体检测模块、图像采集模块、控制器、无线通讯模块和智能终端构成,其利用超声波雷达[4][5]和摄像头[6][7][8]监测异常,将现场影像发送至客户智能终端。
1.1 车身探测网构成
可疑物体检测模块和图像采集模块构成挖掘机哨兵系统的车身探测网,该模块由雷达[9][10]与摄像头组成,分别环绕设置在车身周围,如图1所示。

图1 车身探测网示意图
其中在车身两侧各安装1个雷达,车身前后分别安装2个与1个雷达;图像采集模块中,于车身前后、左右各安装1个摄像头;5个雷达与4个摄像头构成了车身周围的探测网,对车身周围物体监测,实现防盗功能。
1.2 系统方案组成
可疑物体检测模块、图像采集模块和无线通讯模块分别与控制器连接,控制器通过可疑物体检测模块采集车身四周可疑物体信号,判断车身周围可疑物体与车身之间距离是否位于设置的报警距离阈值范围内,若车身周围可疑物体与车身之间距离小于等于报警距离阈值,则控制图像采集模块开启,通过图像采集模块采集车身四周图像信息,采用融合算法将得到的所有图像信息进行融合,得到车身周边图像,并通过无线通讯模块将车身周边图像传输至智能终端。
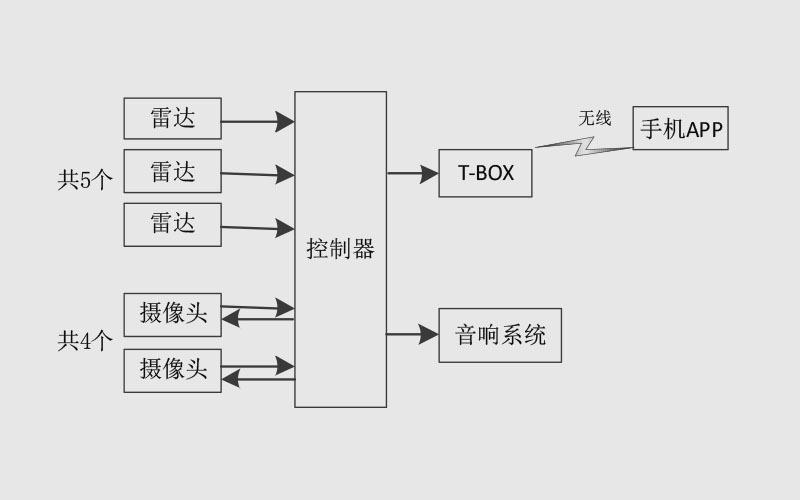
图2 系统结构图
(1)可疑物体检测模块
所述5个雷达与控制器连接,用于实时检测车身周围可疑物体与车身之间的距离,并传输至控制器,控制器实时采集5个雷达信号,实时监控车身四周可疑物体与车身的距离。
(2)图像采集模块
所述4个摄像头与整车控制器连接,用于当车身周围可疑物体与车身之间的距离小于等于设定的报警距离阈值时,控制器控制4个摄像头电源开启,通过4个摄像头采集车身四周的现场图像,采用融合算法将各个摄像头采集车身周围的现场图像进行融合,得到车身周边图像。
(3)控制器
哨兵系统的核心处理器,其判断车身周围可疑物体与车身之间距离是否位于报警距离阈值范围内,若车身周围可疑物体与车身之间距离小于等于报警距离阈值,则控制图像采集模块开启摄像头,继而将图像进行发送。
(4)无线通讯模块和智能终端
无线通讯模块为T-BOX,可以通过无线网络传输影像、图片等数据。控制器通过T-BOX将车身周围的现场图像发送到车主的手机,即智能终端,同时,手机通过T-BOX向控制器发送控制指令,控制器接收到控制指令后控制音响系统打开,播放警告音乐。
2 控制策略模型搭建
本文通过Simulink平台,针对以上控制系统进行模型搭建测试,雷达接收获取到可疑物体相对于车身的距离,将此因素作为系统的输入变量,将摄像头状态设置与整车音响系统作为系统的被控对象,模型搭建系统流程如下。
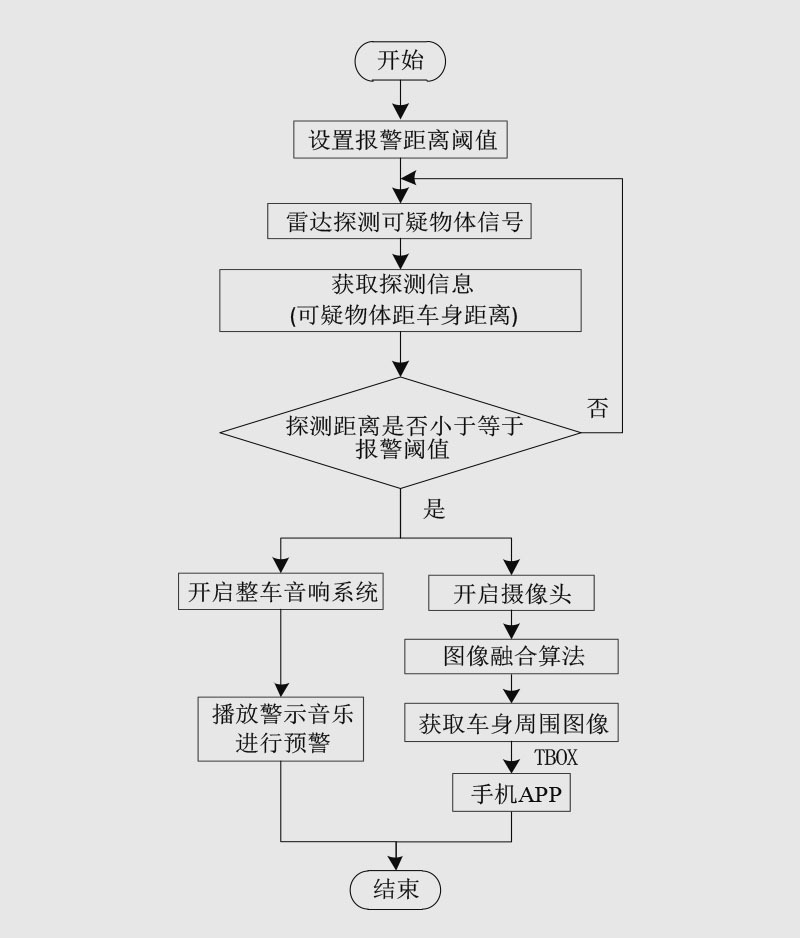
图3 系统流程图
3 结语
本文讨论了一种新型的挖掘机用防盗方法-哨兵系统,通过使用多个雷达检测机器周边物体;使用多个摄像头拍摄机身周边现场图像,能够及时的将影像信息传输到车主手中,克服了传统监控的滞后性;一方面,可以在事件发生前通知车主,并进行预警;另一方面,可根据车身的现场图像信息判断出是否存在盗窃行为,保证了机器的安全。
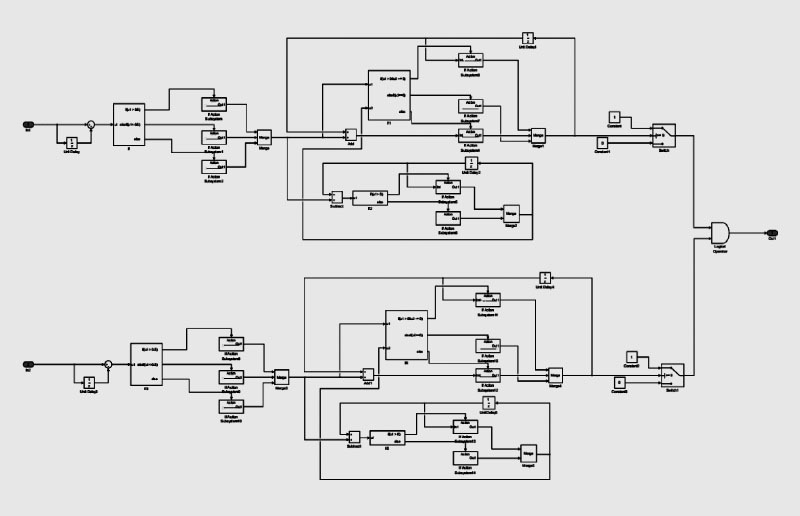
图4 系统控制模型
参考文献
[1] 邹十践. 我国工程机械行业现状及发展趋势[J]. 交通世界(建养.机械), 2014(9):22-29.
[2] Ha Q P, Nguyen Q H , Rye D C,etal.Impedance control of a hydraulically actuated robotic excavator[J]. Automation in Construction, 2000, 9(5-6):421-435.
[3] 何清华, 吴烨, 纪云锋. 液压挖掘机的电子监控系统[J]. 机电工程技术,2003(05):96-98.
[4] 裴暑云, 谢强伟. 超声波雷达倒车系统的设计及其应用[J]. 数字技术与应用, 2013(8):162.
[5] 李守晓, 毕欣, 曹云侠, etal.毫米波雷达的汽车盲点检测系统研究与设计[J]. 机械设计与制造, 2013(31):25-27.
[6] 牛文昊, 王士林. 多监控摄像头特定目标检索方法研究[J]. 通信技术, 2017, 050(003):436-443.
[7] 周思慧, 李成斌. 多摄像头目标检测与跟踪方法研究[J]. 科学与信息化, 2019(7):197-197.
[8] 颜杰. 多摄像头目标检测与跟踪方法研究[D]. 华中科技大学.
[9] 王闽, 姚金杰, 樊亚红, etal. 基于雷达及北斗定位的车内防遗监测系统设计[J]. 计算机测量与控制, 2019(9):32-36.
[10] 贺凯. 无人机载雷达在露天矿边坡位移监测中的应用[J]. 煤矿安全, 2018, 49(3):118-120,124.
(责任编辑:休鱼)
相关下载








有限公司董事总经理森常隆履新")
战略协同 纵深发展 日立建机销售(中国)有限公司董事总经理森常隆履新
2024-04-10

品质见证实力 | 山东临工又获中国工程机械年度产品TOP50奖项!
2024-04-07

“定海神针”立珠江,徐工挑起超级工程建设大梁
2024-04-02

点击排行

北京编辑部地址:北京市海淀区西四环中路6号
邮编:100039
电话:010—68548655
长沙编辑部地址:长沙市银盆南路361号
邮编:410013
电话:0731—88923960
电子邮箱:tougao@ccm-1.com
服务热线
 湘公网安备 43010402001224号
湘公网安备 43010402001224号